2.2. Helyes viselkedés: A racionalitás fogalma
Az intenzív terápia adatfeldolgozása nem rendelkezik 100 éves múlttal, de a diszciplína már így is több évtizede írja történelmét, és az anesztéziával számos rokon vonással rendelkezik. Hasonló monitorizálási standardokkal építkezik, mint a műtői betegmegfigyelés, viszont adatállományának mennyisége nagyságrenddel több, mint az anesztéziáé. Ezzel együtt megszerkesztésében is különbözik, hiszen itt osztályos ápolásról, kórlapírásról van szó, vagyis az adatfeldolgozási kötelezettség és az írott anyag szolgáltatásának igénye szélesebb. Az obszervációs-kezelési időtartam is hosszasabb, mint a műtői tevékenységé (1.sz. táblázat).
Az Osztály felépítése is modellezhető egy informatikai hálózat alapján, ahol a LAN alkotóelemei rendszerbe foglalva képezik le az adatforgalmat, és kapcsolódnak egy szélesebb hálózathoz, amely a kórház egészét jelenti. Az egy monitoron integrálásra kerülő információk gyűjtése és megjelenítése pedig a PAN (Personal Area Network) egyik modellje lehet (1.sz. ábra). Ha a munkaállomásokat ágymelletti őrzőként képzeljük el, az adatokat tároló szervert központi monitorként, akkor felépítettük a hálózatot. Ehhez számos kliens (infúziós pumpa, lélegeztetőgép stb.) csatlakozhat. Rendelkezésre áll ezek szerint egy olyan komplett rendszer, amely az információs technológia lehetőségeit most már csak a felhasználó igényei, vagy igényessége szerint alkalmazza. Az utóbbi években pedig a rendszer integráció olyan fokra jutott, hogy a betegágy melletti „intelligens monitor” amellett hogy elvégzi a „megszokott” jel-, trend-, görbe-, adatbemutatást, képes még a digitalizált röntgenfelvételek és egyéb képalkotó eljárások képeit elérni és bemutatni.
1. táblázat - Az anesztézia és az intenzív terápia rokon vonásai az Információs Technológia területén
|
Anesztézia |
Intenzív |
|
|
Megfigyelés-szabályozás |
Adat validálás, adat integráció, Intelligens alarm, „closed loops” rendszerek |
|
|
Döntéstámogatás |
Anesztézia tervezés |
Szakértői rendszerek Döntéstámogatás |
|
Dokumentáció |
Elektronikus beteg dosszié, papírmentes környezet |
|
|
Gazdaságosság |
Standardok, kódrendszerek, eszközhasználat követés |

Ehhez azonban még szükség van további definíciókra, amelyek meghatározzák azt a helyet, ahol a betegekről szóló összes adatot összegyűjtjük, és az ezt végző program leírását, amely pedig az információs technológia hardver elemeit használja. A PDMS (Patient Data Management System) kifejezés takarja általában a cég specifikus programokat, és minden ilyen program az „elektronikus beteg dosszié” kosarába gyűjti össze az aktuális megjelenés – ápolás adatait. Az osztályon dolgozó orvosok figyelmét elsősorban a PDMS rendszerek kötik le, hiszen a monitorok – központi monitor szisztéma mintegy magában foglalja ennek lehetőségét, és a piacon levő cégek is erre koncentrálnak. Az optimális megoldást az jelenti, ahol a beteg adminisztratív adatainak kezelése mellett a mért élettani paraméterekre is rálátása lehet az alkalmazónak. Ez mindenképpen robusztus programot, megfelelően széles adatrögzítő kapacitást igényel-, gondoljunk csak egy olyan betegre, akit több mint100 napig kezelünk tartós lélegeztetést alkalmazva. Az itt felhalmozott adatok mennyisége rendkívül nagy lehet. Az adminisztratív adatok felvitele a beteg dosszié kisebbik része, de fontosságát nem szabad lebecsülni, mivel a finanszírozásnak ezek az alapadatai. Az aktuális megjelenéshez kötött adatállomány bír a számunkra fontos szakmai tartalommal. Ebben a beteg sorsát leíró minden mozzanatot rögzítenünk kell, legyen az vizsgálat, gyógyszerelés, speciális táplálás, ápolás, vagy akár a napi mért paraméterek trendje. Mindazon munkahelyen, ahol ilyen szélességű és mértékű adatállomány áll rendelkezésre az ott dolgozó szakembereknek szinte határtalanok a lehetőségei, amikor tudományos munkához igyekeznek adatokat gyűjteni, vagy csupán a gyógyítás eredményességét szeretnék lemérni. Erre világít rá az a tanulmány például, amelyik a non invazív és invazív monitorozás képességeit veti össze. A rendszerek összevetése azt az eredményt szülte, hogy a nem invazív monitorozási rendszer ma már elfogadható alternatívája a másik módszernek, ahol nem áll rendelkezésre az invazív technika.
Az információs technológia egyik fő jellemzője az, hogy a fejlesztése – fejlődése egyetlen pillanatra sem áll meg. Az intenzív osztályokon számos esetben a rendszer fejlesztését lokális monitorokkal igyekeznek megkerülni.

1995-ben alakult meg a Magyar Aneszteziológiai és Intenzív Terápiás Társaság Informatikai Szekciója. A kezdeti időszak munkájának egyik legfontosabb eredménye az volt, hogy felépített egy dedikált rendszert Anesztinfo néven. Ez a Docinfo szisztéma szerkezetét követte azzal a különbséggel, hogy a Docinfo a családorvosok számára teremtett kapcsolatot egy központi tudásbázissal, az Anesztinfo pedig a kórházak Aneszteziológiai és Intenzív terápiás Osztályai részére hozott létre információs központot. Az akkori lehetőségek a BBS, vagyis telefon –behívásos rendszer használatát tették lehetővé.
Ezzel párhuzamosan alakult munkacsoport a szakma minimális adatállományának (minimum basic data set) kialakítására, és az aneszteziológia intenzív terápia adataira jellemző rekordkép létrehozására. Az 1989-ben megalakult ESCTAIC (European Society for Computing and Technology in Anasthesia and Intensive Care) tapasztalatai felhasználásra kerültek a munka minden fázisában. A www.anesztinfo.hu oldal (2.sz. ábra) kialakításakor az aneszteziológiában történelmet író www.gasnet.org megalkotóinak tapasztalatai szintén komoly segítséget jelentettek.
Dr. Nagy Géza, Dr. Mező Tibor, 2003, Országos adatgyűjtés Web-alapú rendszerrel az ANESZTINFO honlapon, Aneszteziológia Intenzív Terápia, 4, 50-55.
Nagy Géza, 2008, Az informatika szerepe az Aneszteziológiai és az Intenzív terápiás dokumentációban, MOTESZ Magazin, 40-45.
Varon J, Marik PE, 1999. július, Critical Care and the Word Wide Web, Crit Care Clin 15 (3), 593-604.
A mesterséges intelligencia célját illetően több megközelítés is ismert. Az egyik szerint a cél az emberi tudat mesterséges megalkotása, vagy azzal ekvivalens működés elérése (kognitív modellezés). A másik megközelítés gyakorlatias szempontból vizsgálja meg a kérdést, és azt tartja, hogy a végső cél „hasznos dolgok” létrehozása, és semmi több, vagyis az ennél elvontabb okfejtéseket feleslegesnek tartja. A harmadik hozzáállás azt mondja, hogy a cél valójában az „intelligencia teremtése”, azaz intelligens rendszerek, ágensek megalkotása, ahol is fontos kiemelni, hogy nem feltétlenül az emberi intelligencia utánzására törekszünk. Mindhárom megközelítés a mesterséges intelligencia egy-egy aspektusára világít rá, és mindhárom megközelítés a maga módján hasznos, de az ágenseken értelmezett racionalitást legjobban a harmadik megközelítésen keresztül, az intelligencia fogalmát taglalva közelíthetjük meg [1].
Adódik a kérdés, hogy mit is értünk „intelligencia” alatt. Az intelligencia fogalmát alapvetően elhatárolhatjuk a „tudat” ill. „öntudat” fogalmától, melyek tárgyalása olyan filozófiai, pszichológiai, teológiai okfejtéseket von maga után, melyek terjedelme meghaladja jelen esszé korlátait [2]. (Megj.: Elég annyit megemlítenünk, hogy a híres Turing-teszt, a Kínai-szoba kísérlet és az agyprotézis kísérlet nem csak képtelenek a tudat mesterséges előállíthatóságát bizonyítani, hanem egyben az emberi tudat meglétét is megkérdőjelezik, hiszen az ember tekinthető bemenetekkel és kimenetekkel rendelkező ágensnek. [2] ) Az intelligenciát tanulmányozhatjuk „fentről lefelé” (top-down), és az intelligencia fogalomhoz olyan tulajdonságokat társíthatunk, melyeket a tanulmányozott, intelligensnek hitt rendszerek (emberek, biológiai rendszerek, ...) tanúsítanak. A másik irány (bottom-up) az, hogy megfigyeljük a mesterségesen létrehozott rendszereket, és azoknak a tulajdonságaiból következtetünk egy olyan intelligencia fogalomra, ami számunkra hasznos. A két megközelítést magában foglalja az a definíció, mely szerint az intelligenciát a világgal való interakciók dinamikája határozza meg [3]. Az intelligencia meghatározásában azonban sokkal kézzelfoghatóbb (használhatóbb) definíció(ka)t is keresünk. Az ágens-alapú megközelítésben az intelligenciával erősen korrelál az a képesség, hogy az ágens sikeres viselkedést tanúsít adott környezetben adott információ mellett [1] - amit másképpen racionalitásnak is hívunk.
A fenti megfogalmazás egyértelművé teszi, hogy az intelligenciát a racionalitással érdemes definiálni, az intelligencia alapvető vonása a racionalitás. A racionalitás akkor vizsgálható, ha az ágensen és a sikeresség fogalmán kívül a környezet és a hozzáférhető információk halmaza is adott. A továbbiak során látni fogjuk, hogy a környezetre azt a megkötést kell tegyük, hogy az ágens cselekvéseivel sikert tudjon elérni benne. (Pl. egy képfelismerő szoftver, mint ágens, nem nagyon tudna „intelligenciát” tanúsítani egy pénzügyi trendeket analizáló környezetben.) A rendelkezésre álló információ pedig rendszerint belső tudásból és külső (szenzorikus) inputból áll.
Mielőtt továbbmegyünk, és az intelligenciát definiáló racionalitás különböző válfajait megvizsgáljuk, érdemes megemlítenünk, mit is értünk ágens, racionális ágens, illetve annak jellemző tulajdonságai alatt. Egy ágens nem más, mint valami, ami környezetét érzékeli és cselekedeteivel megváltoztatja azt. Egy racionális ágens ehhez képest annyiban más, hogy helyesen cselekszik [2]. Ehhez rendelkeznie kell információval arról, hogy mi a „helyes”, és mi a „helyesebb”. Teljesítményértéknek nevezzük azt a kritériumot, hogy egy ágens mennyire sikeres, mennyire cselekszik helyesen, a cselekedetei mennyire hozzák közelebb a célhoz. A helyesség megítélése mindenképp csakis a cél, a lehetséges cselekedetek, a megfigyelések és a meglévő tudás tükrében történik (amelyből megtudható, hogy mi a döntések várható hasznossága), vagyis egy nem-mindentudó ágens is lehet teljes mértékben racionális. Ezt illusztrálandó kitűnő példa az, amikor egy ember megnézi a vasúti menetrendet, összepakol és ki is megy a pályaudvarra, hogy a kívánt vonatot elérje - ám ekkor értesítik arról, hogy a járat műszaki okok miatt legközelebb másnap indul. A példabeli ember teljesen racionálisan cselekedett, ám nem volt mindentudó (omniscient) [2].
Az ideális racionális ágens (ideal rational agent) minden egyes észlelési sorozathoz a meglévő tudása alapján mindent megtesz a teljesítményérték maximalizálásáért. Ebből nem következik az, hogy az ideálisan racionális ágens úgy dönthet, hogy nem nézi meg a menetrendet, és hiányos észlelései alapján kimegy a pályaudvarra (amúgy teljesen racionálisan, hiszen tudja, hogy a vonat a pályaudvarról indul). A racionalitásba ugyanis beletartozik a hasznos információk felkutatására szánt cselekedetek megválasztása is. Könnyen belátható, hogy ez megemelheti a végül adódó teljesítményértéket, így adott esetben az informálódás maga a racionális cselekedet [2]. Mindezek mellett természetesen előfordulhat, hogy a példabeli, racionálisan informálódó ember csalódottan hazamegy, ám öt perccel a távozása után a vasúttársaság mégis indítja a járatot. Ugyanakkor nagyszámú esetet vizsgálva mégis egyértelműen adódik, hogy az egészséges mértékű informálódás emeli az elérhető teljesítményt. Eldöntendő kérdés tehát, hogy mi is az az információ, ami hasznos, és az informálódásnak mennyi az egészséges mértéke. Itt érdemes megemlíteni, hogy a racionalitásnak két nagy alkategóriáját tudjuk megkülönböztetni: a szubsztanciális illetve a procedurális racionalitást. Míg a szubsztanciális racionalitás azzal foglalkozik, hogy melyik döntést kéne meghozni, addig a procedurális racionalitás arra vonatkozik, hogy a döntést hogyan kéne meghozni, természetesen mindvégig a teljesítmény maximalizálásának célját szem előtt tartva [1].
Egy racionális ágens működési bonyolultságát tekintve lehet reflexszerű (reaktív), cél- vagy hasznosságorientált, avagy hibrid. A célorientált ágens csupán azzal törődik, hogy a környezete a megfelelő célállapotba kerüljön - ez nyilván racionális törekvés a részéről. Az is nyilvánvaló, hogy erre a feladatra akár több jó megoldási utat is találhat a lehetséges állapotok és az azok közt átvezető cselekvések gráfjában, illetve azonos helyzetekben különbözőképpen dönthet. Ez nagy szabadságot is biztosít neki a reaktív ágensekhez képest, akik egyszerű ha-akkor feltétel-cselekvés szabályokat tartalmazó táblák alapján működnek, és a világról nem tárolnak semmilyen állapot-információt. Belátható, hogy amennyiben a tervező a saját maga által meghatározott válaszcselekményt tekinti adott esetben a legértékesebbnek, úgy az általa kreált ágens racionális. Ennek oka az, hogy a reaktív ágens végső célja nem egy bizonyos külső állapot elérése, hanem magának a reflexnek a végrehajtása. A reflexszerű ágens komplex környezetekben nem állja meg a helyét, mert egy célravezető szabálytábla megalkotása ilyen esetben lehetetlen [2].
A hasznosságorientált ágensek a célorientáltakhoz hasonlóak, de nem egy vagy több lehetséges állapotot tűznek ki célul, hanem állapotokhoz, cselekvésekhez, illetve állapotsorozatokhoz egy hasznosság-értéket rendelnek, ezt maximalizálják. Azt is láthatjuk, hogy a cél- ill. hasznosság-orientált ágensek a szabadságukért, illetve az azzal járó intelligenciáért számítási idővel illetve memóriával fizetnek. A memóriájukban a világ egy állapot-orientált modelljét tárolják, amely kellően leegyszerűsíti a környezetüket ahhoz, hogy annak állapotai és állapotátmenetei kezelhetőek maradjanak. Az egyszerűsítés hátrányai nyilvánvalóak: ahogy a modell egyre távolabb kerül a valóságtól, úgy az ágens is egyre kevésbé racionálisan tud cselekedni. (Megjegyzés: Vannak, akik szerint a megoldás erre egyszerű: a világ önmaga legjobb modellje [3]. Brooks és társai a belső reprezentáció nélküli célorientált ágensek tervezését lehetséges fejlődési iránynak tartják.)
A hasznosságorientált megközelítés előnyeit fogjuk felfedezni abban is, hogy nem mindig könnyű a célokat jól meghatározni, illetve nagyon könnyen tudunk rossz célt adni az amúgy tökéletesen racionális ágensünknek. Például, ha egy gyártásfolyamat irányító ágens célját úgy adjuk meg, hogy csökkentse a selejtek számát, a racionális döntés adott esetben az lesz, hogy kikapcsolja a gyártási folyamatot (így az időegység alatt keletkező selejtek száma 0-ra csökken). Az előbbi gondolatmenetet követve képzelhetjük, mit tehetne egy ápoló ágens, ha feladata a beteg szenvedéseinek csökkentése lenne. Ugyanúgy váratlan viselkedést okozhat, ha egy háztartás vezető ágens feladatul kapja, hogy több fényt csináljon a lakásban: könnyedén (és teljesen racionálisan) elérheti ezt a célt úgy, hogy lebontja a tetőt, vagy felgyújtja a házat. Nem is mindig beszélhetünk jól megfogalmazható / megfogható célról. A bírónak, mint ágensnek például egy peres eljárásban nehéz előre meghatározni a környezet célállapotát (bűnösnek ítél / felszabadít), és az ahhoz vezető utat értékelni ugyanolyan nehézkes. Ekkor nyilván egy absztraktabb célra van szükség (igazságszolgáltatás beteljesülése, mint a környezet célállapota).
A hibrid ágensek a reaktív és a cél- ill. hasznosság-orientált felépítést különböző vezérlési szinteken valósítják meg, ezek a szintek olykor felülbírálhatják egymás döntéshozatalát [4]. Jó példa rá az ember, mint hibrid ágens. Legyen a cél az étel elkészítése, ennek megvalósításában fennáll a veszély, hogy olykor forró dolgokhoz érünk. Ha megsütjük magunkat, a célunk továbbra is az étel elkészítése marad, csupán egy pillanatra szól bele a reaktív réteg, mely mindenféle megfontolást mellőzve végrehajtja a „kéz elránt” reflexet.
A racionalitás egyik (nem mindig kötelezően velejáró) jellemzője az autonómia. Egy ágens valamilyen mértékben mindenképp autonóm kell legyen, azaz döntéseit saját tudása illetve percepciói alapján kell meghozza. Sokszor egy mesterségesen előállított rendszer nagy mértékben támaszkodik az emberi intelligenciára (adott esetben az emberi kezelő döntéseire, inputjára), továbbá az outputot is ember értékeli ki. Ekkor intelligensnek, illetve intelligensebbnek hihetjük a rendszert, mint amilyen az valójában, ezt Brooks „hallucinációnak” nevezi [3]. Az ágens-alapú megközelítés elkerüli ezt a problémát, hiszen az ágens az, aki érzékel, adott esetben feldolgoz, és végül cselekszik. Az autonómiának létezik még szigorúbb értelmezése is, mely szerint létezik olyan ágens, amelynek a cselekvéseit csakis a beépített tudás határozza meg, az észlelései pedig egyáltalán nem, s az ilyen ágens nem tekinthető autonómnak [2]. Ez a kezdeti feltételezésünkön, mely szerint az autonómia a racionalitás egyik kísérőjelensége, nem változtat.
Másik gyakran emlegetett tünete a racionalitásnak a kognitív funkciók, képességek megléte. Észre kell vennünk, hogy bár ez is gyakori kísérőjelenség, nem állíthatjuk azt, hogy a racionalitásból kötelezően következik az, hogy az ágens kognitív képességekkel is rendelkezik. Számunkra az ágens, a definíciójából kiindulva, csupán egy „fekete doboz”, amibe észlelések mennek be, és cselekvések jönnek ki eredményül. Arra egyáltalán nem tehetünk megkötést, hogy mi lehet belül [1]. Így akár elképzelhető, hogy a kognitív képességekkel (értelmezés, felfogás, tervezés, következtetés) nem rendelkező ágens racionális legyen (pl. reaktív ágensek). Értelmezéstől függően természetesen érvelhetünk amellett is, hogy a reflexszerű viselkedés is kognitív folyamat. Persze megfelelően mikroszkopikus szinten vizsgálva a másik végletet is igazolhatjuk, nevezetesen azt, hogy az ágensek viselkedését csakis reflexszerű folyamatok (láncolatai) alkotják, így kognitív képességek tulajdonképpen nem is léteznek. Ám a jelen írásnak szerencsére nem célja filozófiai és definícióbeli kérdések feloldása, így a kognitív képességek alatt a továbbiakban is az észlelésre („ko-gnózis”-ra, azaz megismerésre) alapuló információfeldolgozást értem, mely valamivel több a sima „érzékelésnél”.
A kognitív képességek birtokában levő racionális ágens egyik fő ismérve a tudás. Az ágens által megvalósított tudás komponenseit többféleképpen kategorizálhatjuk. Az egyik legegyszerűbb a BDI modell, melyben az ágens tudása hitre (belief), vágyakra (desire) és szándékokra (intetion) tagolódik [4]. A hit megfelel a világról való beépített tudásnak, és a tárolt modellnek: azért hitnek nevezzük, mert nem lehetünk száz százalékig biztosak, hogy tudásunk megfelel a valóságnak (főleg valós környezetekben). A vágyak a célokkal egyenlők, de vágy lehet egy hasznosság- ill. boldogság-szint elérése, vagy egy teljesítményérték elérése is. A szándékok azok a cselekedetek, melyek kiválasztásra kerültek. Látszik, hogy a felosztás az emberi pszichológiából meríti fogalmait. Egy másik, Wiebe van der Hoek és Michael Wooldridge által javasolt felosztás szerint az ágenshez attitűdöket rendelhetünk, és ezeket három elkülönülő kategóriába sorolhatjuk. Az „információs attitűdök” az ágens a világ információihoz való viszonyát tükrözik, a „pro attitűdök” az ágenst cselekvésre sarkalló viszonyulások, míg a „normatív attitűdök” azokat a korlátokat (és tabukat) tartalmazzák, melyekhez az ágens mindenképp tartani fogja magát [5]. Az ágens teljes tudásában így lehetnek egymásnak ellentmondó részterületek, ezért az ellentmondások feloldása és az attitűdök konszolidálása (vagy éppen helyzetnek megfelelő hierarchiába rendezése) ugyancsak a procedurális racionalitás kérdéskörébe tartozó feladat.
Amikor racionalitásról beszélünk, gyakran tökéletes racionalitást értünk rajta, vagyis azt, hogy egy ágens ténylegesen minden egyes pillanatban csakis azt cselekszi, ami a várható teljesítményértéket maximalizálja [1]. A valóságban ez egy idealizáció csupán, hiszen megfelelően nagy problématér esetén a számítások nem megoldhatóak véges időben, a tökéletesen racionális ágens ellenben azonnal a megfelelő cselekvéssel kéne válaszoljon. Így a tökéletes racionalitás csupán elméleti alapját képezi a mesterséges intelligenciának, a gyakorlatban más megközelítés mérvadó [2]. Egy gyakran alkalmazott elv a számítható racionalitás implementálása. A számíthatóan racionális ágens tökéletesen racionális viselkedést mutatna, ha végtelenül gyorsan futna az őt irányító program (következtetési mechanizmus) [1]. Mivel a valóságban nem ez a helyzet, kijelenthetjük, hogy a számíthatóan racionális ágens legvégül valóban a legoptimálisabb megoldást találja meg, de ezzel gyakran „késve érkezik” [2].
Világossá válik, hogy az idő egy kritikus faktor, és ezáltal a számítási erő (computational power) egyenesen meghatározza az effektív racionalitást, vagyis azt, hogy mennyire hasznos egy ágens racionalitása [6]. Be kell látnunk, hogy nem csak a döntés minősége határozza meg a hasznosságot, hanem a sebessége is. Ugyanúgy, az idő korlátozottsága miatt kell elgondolkodnunk azoknak az elemeknek az időbeli arányán és egyensúlyán, melyek általában a racionalitást jellemzik. Egy időben korlátozott ágensnek egy megfelelő egyensúlyt érdemes felmutatnia a reaktivitás (reflexszerű viselkedés) és a pro-aktivitás (kezdeményező viselkedés) között. Ehhez hasonlóan egyensúlyban kell tartania a percepció (észlelés), a következtetés (mérlegelés), és végül a cselekvés folyamatait, hiszen ezek gyakran időben egymás után kell lefussanak, és arányuk nagyban meghatározhatja az ágens hatékonyságát. Harmadikként az önérdeket és a szociális érdeket kell megfelelően kiegyensúlyozniuk, ha adott esetben interaktív multi-ágenses környezetben törekszenek a céljaik megvalósítására [7]. Arra is figyelnünk kell, hogy ne menjünk bele felesleges következtetések levonásába (ne pazaroljuk a számítási időt). Kimutatható, hogy minden feladathoz létezik egy „minimális racionalitás”, melynek következtetési komplexitását szükségtelen túllépnünk, és mégis (a feladat szempontjából) racionálisnak fogjuk tapasztalni az ágenst [8]. Nem utolsó sorban a feladatnak megfelelő egyensúlyban kell tudni tartani a döntés minőségét és annak sebességét. Mindezen egyensúlyok lehetnek a tervező által előre meghatározottak, vagy fejlettebb esetben az ágens maga hozhatja döntéseit az egyes egyensúlyok optimalizálását illetően. A következőkben ilyen kompromisszumokat fogunk keresni a számítási idő és a tökéletesség (minőség) között.
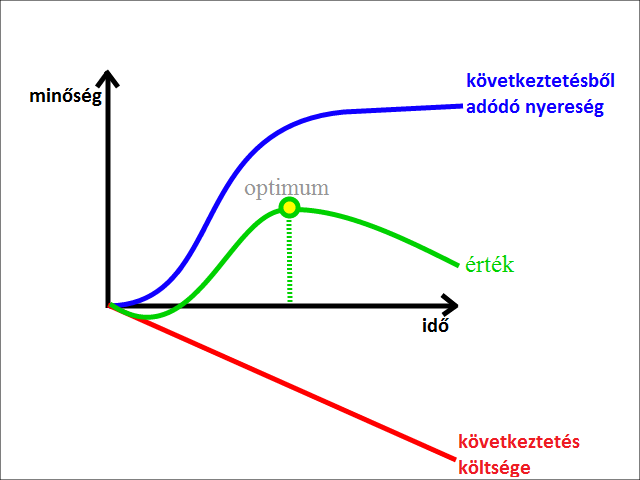
A tökéletes és a számítható racionalitás után a meta-szintű racionalitás egy olyan harmadik alternatíva (II. típusú racionalitásnak is nevezik), amely erősen épít a procedurális szint optimalizálására, és a számításokat magukat is cselekedetnek tekintve mérlegel azt illetően, hogy milyen következtetési eljárásokkal és milyen mélységig érdemes kalkulálni. A közismert „anytime” algoritmusok tipikus implementációi a fenti sémának. Az jellemzi őket, hogy bármikor állítjuk meg a futásukat, valamilyen eredményt annak, s annak minősége (tipikusan) idővel monoton növekvő (1. ábra). A meta-következtető rendszer ehhez a minőséghez egy hasznosság-értéket rendel a feladat szempontjából, majd ezt összehasonlítva a számítási költséggel eldönti, hogy mennyi ideig fusson az algoritmus, azaz mennyire optimális eredményt tekinthetünk adott esetben a legértékesebbnek. Talán érezhető a „meta” előtag jogos használata, hiszen az optimalitás optimális mértékét számítjuk. A módszer buktatója megint csak az, hogy a legprimitívebb (legegyszerűbb, mohó kereséssel működő) meta-következtető rendszereket lehet csak jelentős (meta-következtetésből származó) overhead nélkül implementálni. A meta-szinten továbbá megismétli magát az objektumszinten (szubsztanciális szinten) tapasztalt tény, nevezetesen az, hogy tökéletes illetve számítható racionalitást nem tudunk itt sem (gyakorlati szempontból használhatóan) implementálni. Gyakorlatias megfogalmazásban összefoglalva: a következtetésről való következtetéssel nem tudtunk jelentősen javítani a következtetés sebességén. Erről meta-meta-szintek bevezetésével érvelni pedig érezhetően koncepcionális regresszióba vezet [1].
Az elméletet és a gyakorlatot összekötő híd keresésében végül eljutunk a racionalitás negyedik formájához, a korlátozott racionalitáshoz (korlátozott optimalitás, bounded optimality). A Russel-Norvig könyv 27. fejezete a következő definíciót adja rá: „Egy korlátozottan optimális ágens a lehető legjobban cselekszik a számítási erőforrásaitól függően” [2]. Lényegét tekintve azért beszélünk korlátozottságról, mert az ágensünkben működő racionalitás nem minden inputra ad optimális választ, az optimumot is gyakran csak bizonyos korlátok között közelíti, továbbá ágens-specifikus (nem minden gépen racionális, vagy csak ágensek egy korlátozott osztályán). Ez az a racionalitás, amely a mesterséges intelligencia gyakorlati oldalát jellemzi. Számunkra legfontosabb vonása, hogy csakis korlátozott, bizonyos szabályok szerint működő környezetben tud sikeresen viselkedni, hiszen erre lett tervezve. Éppen emiatt kiértékelő függvényeit gyakran heurisztikák jellemzik. Az aszimptotikusan korlátozott optimalitás fogalma még annyiban több, hogy az azt megvalósító program nem csak egy meghatározott gépekből álló halmazon működik, hanem az azoknál erősebb (gyorsabb) gépeken is fut, méghozzá mindenképp jobb teljesítménnyel [2].
Magát az implementációt rengeteg területről megközelítették már, megnevezés szintjén nem árt áttekintenünk ezeket. Elsőként érdemel említést a közgazdaságból átvett döntéselmélet, hiszen a mesterséges intelligencia mindig is szívesen nyúlt a racionalitás közgazdasági definíciójához (maximum utility, maximális haszon/hasznosság). Mind a mai napig jelentős terület a tőzsdei kereskedőrobotok fejlesztése és tanulmányozása. A másik rokon, de valamelyest eltérő forrásterület a játékelmélet, melyben a fókusz nem az egyéni döntések racionalitásán van, hanem azon, csoportok hogyan döntenek (vagy dönthetnek), és ott mennyire (nem) racionális az egyéni célok követése, illetve mi a csoport szempontjából legkedvezőbb kollektív eljárás. Egészen más megközelítés, ugyanakkor nem kevésbé jelentős tudományterület a klasszikus logika, melynek kvantorokkal kibővített változata (elsőrendű logika) vált a mesterséges intelligenciában megjelenő „tudás” egyik fő leíró nyelvévé. A temporális logika ennek időbeli állapot-információkkal való kibővítése, míg az elágazó temporális logika több lehetséges idősíkon végzi a keresést a lehetséges állapotok terében [9]. Érdekes és befolyásos továbbá a racionalitás felépítésének biológiai megközelítése, melyben külön hangsúlyt kapnak a neurális és evolúciós folyamatokból nyert ötletek (neurális hálók, genetikus programozás).
Mindeddig a racionalitásról, mint kívánatos, sikeres stratégiáról volt szó. A pszichológia és a közgazdaságtan már rég felfedezte, hogy az ember (ennek ellenére) nem (mindig) racionális. Hashimoto kártyás kísérleteiben bemutatta, hogy az ember matematikai szempontból irracionálisan játssza a kártyajátékot, így mindig a (racionális) gép győz [10]. Az emberi irracionalitás így nem tűnhet túlságosan jó túlélési stratégiának, és emiatt nehezen érthető, hogy az evolúció során mégis miért nem gépszerűen racionálisakká váltunk. A választ abban találjuk, amit a pszichológia explorációs motivációnak nevez. Az ember időről időre irracionálisan viselkedik, hogy véletlenszerű, szub-optimális állapotokat is megtapasztaljon (melyeket a racionális viselkedés talán soha nem is érintene). Valójában célja is van ezzel: a tapasztalatok összegyűjtésével törvényszerűségekre bukkanhat rá, melyek nagymértékben megnövelhetik a túlélési esélyeit, ebben bízik. Ha a vizsgált kártyajátékban lett volna törvényszerűség, azt az emberi ágensek hamar felfedezték volna, és legyőzték volna a gépet... Vonjuk le a következtetést nagyobb skálán is: ha az életet játéknak/feladatnak tekintjük, melyben sikeresek akarunk lenni, akkor vajon miért is állunk irracionálisan az élethez? Hashimoto válasza egyszerű: „Mi emberek abban bízunk, hogy a világnak létezik egy rejtett törvényszerűsége, melyre ha rábukkanunk, túlélhetjük a világot [10]”.
[1] Stuart Russell - Rationality and Intelligence, 1995 (Artificial Intelligence 1997/94, p. 57-77.)
[2] Stuart J. Russel, Peter Norvig - Mesterséges intelligencia - modern megközelítésben, 1995 (Panem 2000 Bp.) - 2., 26., 27. fejezetek
[4] Jouni Jokelainen - Autonomous Agents in Artificial Intelligence Research
[7] Michael Wooldridge and Anand Rao - Foundations of Rational Agency, 1999 (Kluwer Academic Publishers)
[10] Fumihiko Hashimoto - How can irrational agents survive? (Osaka City University, Japan )
Szerző: Remeli Viktor, BME
A teljesítménymérték határozza meg általánosságban közvetve az ágensek által adott környezetben megoldandó feladatot. Az ágensek célja az, hogy minél inkább megfeleljenek ennek a teljesítménymértéknek, azaz úgy cselekedjenek, úgy változtassák a környezet állapotát, hogy az a legjobb legyen (maximalizálja a teljesítménymértéket).
Egy elektronikus kereskedésben résztvevő szoftver ágens esetén például a teljesítménymérték feltehetően egyenesen arányos az ágens által generált anyagi profittal. Egy sakkozó ágens esetén pedig legegyszerűbb esetben 1, ha az ágens nyert, és -1, ha veszített. Ennél valamivel árnyaltabb képet ad, ha azt is figyelembe vesszük, hogy az ágens miként jutott a játszma végére. Például a teljesítménymérték annál nagyobb lehet, minél hamarabb, és minél kevesebb áldozattal tudott nyerni (vesztés esetén pedig díjazható például a hosszas, kitartó, feszített játék, csekély veszteség).
Ha az ágens egymaga van a környezetében (azaz nincsenek más ágensek), a környezet determinált, és nem dinamikus, úgy általában igen egyszerű meghatározni, hogy mit kellene tennie az ágensnek ahhoz, hogy egy adott teljesítménymértéket maximalizáljon. Viszont, ha a környezet nem determinisztikus, vagy dinamikus (például azért, mert más ágensek is tevékenykednek benne), úgy a teljesítménymérték maximalizálása már egyáltalán nem triviális feladat. Több ágens esetén a játék-elmélet kínál használható megoldást, nem-determinisztikus esetben a Markov-folyamatok, míg nem teljesen hozzáférhető (kvázi nem-determinisztikus) környezet esetén többek között a megerősítéses tanulás.
A teljesítménymérték az ágens működésének hatékonyságát, hasznosságát méri egy adott környezetben, és egyben a környezet viszonylatában implicit módon az ágens által megoldandó problémát is definiálja (lásd. probléma-környezet). Absztrakt szinten a teljesítménymérték tekinthető egy leképezésnek, amely állapot-történetekből képez valós számokba. Valójában arról van szó, hogy egy, vagy több állapot szokta jellemezni az ágens (vagy tervezője) által elérni kívánt célt, illetve az ahhoz való eljutás módja-menete sem mellékes az ágens teljesítményének megítélésekor. E megoldások könnyű összehasonlíthatóságát teszik lehetővé a valós számok, amennyiben mindegyikhez tudunk társítani egyet-egyet.
Annak érdekében, hogy az előbbieket formalizálhassuk, vezessük be először a környezet lehetséges állapotainak X halmazát, továbbá az időpillanatok T (< reláció által teljesen) halmazát, amely az ágens működése kapcsán vizsgált összes időpillanatot tartalmazza kronológiai sorrendben. Az általánosság megszorítása nélkül most csak a pozitív egész számokat (beleértve a nullát is) tekintsük. Feltételezzük, hogy a környezet minden időpillanatban egy és csakis egy bizonyos állapotban lehet. Ez a mindenkori állapot pedig attól függ, hogy miként változik a környezet időpillanatról időpillanatra (az ágens cselekvéseinek hatására, vagy magától is, esetleg egyáltalán nem). Ennek részletezése túlmutat a jelen anyagon, így erre most nem térünk ki bővebben.
Vezessük be az állapot-történetek XT={XT: T → X} halmazát, ahol XT egy állapot-történetet jelöl, egy függvényt, amely minden időpillanathoz hozzárendel egy-egy környezeti állapotot. Magyarán egy állapot-történt azt mondja meg, hogy a környezet mikor melyik állapotban volt egy adott lefutás során. Ezekhez a lehetséges lefutásokhoz rendel tehát a teljesítménymérték egy-egy valós számot. Vegyük észre, hogy itt nem foglalkozunk azzal, hogy aktuálisan (pl. a lefutás során) mi a jelen, a múlt, vagy a jövő. Ennek oka egyszerű: a bevezetett leírások nem igénylik a „jelen” bevezetését. Az ágensről egy-egy teljes lefutás kapcsán beszélünk most.
Definíció. Teljesítménymérték:
U: XT → R
Látható, hogy általánosságban a teljesítménymérték nem csak egy, vagy több környezeti állapotot értékel, hanem egy egész állapot-sorozatot. Magyarán a teljesítménymérték azt is figyelembe veheti, hogy milyen állapotokon keresztül, milyen állapot-történeten át jutott el a környezet a végállapotba. Természetesen konstruálhatunk olyan egyszerűbb, saját teljesítménymértéket, amely ennek speciális eseteként például csak az utolsó, ágens leállásakor adódó környezeti állapotot értékeli, de olyat is, amely minden állapot-történetbeli állapotot mérlegel.
Jelölje az ágens környezetét E, a vizsgált ágensnek megfelelő ágens-függvényt pedig f. Az ágens cselekvései nyomán előálló környezeti állapot-történetet Hatás(f, E) jelölje. Itt az állapot-történetet nyilván egy adott T időpillanat-halmaz (időszak) felett értelmezzük, ami lehet véges, de elvben akár végtelen is. Ekkor egy adott ágens-függvénynek megfelelő ágens adott környezetben vett hasznát a következőképp számíthatjuk:
V(f, E) = U(Hatás(f, E))
Itt tehát bevezettünk egy újabb jelölést: V jelöli azt a haszon-függvényt, amely a teljesítménymértékre alapozva megmondja, hogy mennyire jó egy adott ágens-függvénynek megfelelő ágens egy adott környezetben. Az ágens (illetve tervezőjének) célja e függvényt maximalizálni (vagy minimalizálni). A cél tehát az, hogy az adott környezetben az ágens olyan állapot-történetet eredményezzen, amely maximálja a teljesítménymértéket.
Például egy Forma 1-es autóversenyző ágens számára cél lehet az, hogy minél több világbajnoki címet nyerjen. Ez az elsődleges. Viszont alaposabban megvizsgálva a helyzetet az sem mindegy, hogy ezt miként éri el. Számításba jöhet a szabálytalanságok és incidensek számának minimalizálása, a rajt és verseny elsőségek, illetve a versenyen futott leggyorsabb körök számának maximalizálása, vagy akár a felhasznált erőforrás ráfordítás (energia, idő, pénz) minimalizálása is. Általánosságban tehát nem csak egy maximálisan hasznos állapot elérése lehet cél, hanem egy maximálisan hasznos állapot-történet elérése is.
