24.6. Navigálás és manipulálás a látás segítségével
A látás egyik legfontosabb alkalmazása az, hogy információt szolgáltat az objektumok manipulálásához – hogy felszedhessük, megfoghassuk, elforgathassuk stb. azokat –, valamint hogy akadályok kikerülésével navigálhassunk. Az a képesség, hogy a látást ezen célokra használják, a legprimitívebb állati látórendszerekben is jelen van. Sok esetben a látórendszer minimális abban az értelemben, hogy a rendelkezésre álló látómezőből csak annyi információt nyer ki, ami az állat viselkedésének a tájékoztatására szükséges. Igen valószínű, hogy a modern látórendszerek a korai, primitív organizmusokból fejlődtek ki, amelyek egy fényérzékeny foltot használtak az egyik végükön, és így tudták magukat a fény felé vagy azzal ellentétes irányba orientálni. A 24.4. alfejezetben láttuk, hogy a legyek egy nagyon egyszerű optikai folyamra alapozó látást használnak, hogy le tudjanak szállni a falon. A What the Frog’s Eye Tells the Frog’s Brain c. klasszikus tanulmány (Lettvin és társai, 1959) megfigyeli, hogy egy béka „éhen fog halni, ha olyan étellel van körülvéve, amely nem mozog. Csak a méret és a mozgás alapján állapítja meg, hogy mi élelem.”
24.23. ábra - Az út képe egy autóban lévő kamerával lefényképezve. A vízszintes fehér csíkok jelzik azokat a keresési ablakokat, amiken belül a vezérlő az útvonali jeleket keresi. A gyenge képminőség nem szokatlan az alacsony felbontású fekete-fehér videók esetében.
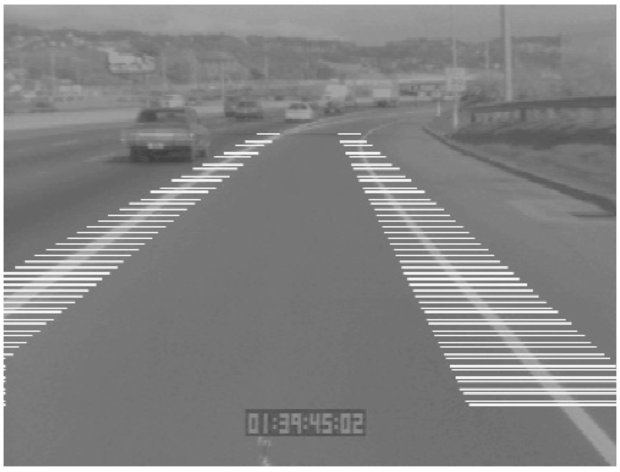
Az „organizmusokban” használt számítógépes látórendszereket robotoknak nevezzük. Tekintsünk egy speciális robotfajtát: egy automata járművezetőt egy autópályán (lásd 24.23. ábra). Először elemezzük a feladatot; azután meghatározzuk a látási algoritmust, amely a feladatok helyes végrehajtásához szükséges. A vezető előtt álló feladatok között találjuk az alábbiakat:
-
Oldalsó irányítás – biztosítani, hogy a kocsi biztonságosan a közlekedési sávon belül maradjon, vagy szükség esetén zökkenőmentesen váltson sávot.
-
Hosszanti irányítás – biztosítani, hogy a kocsi előtt biztonságos távolság legyen.
-
Akadályelhárítás – a szomszédos közlekedési sávokban haladó kocsik figyelése és felkészülés az elkerülő manőverezésre, ha azok valamelyike sávot szeretne váltani.
A vezető feladata, hogy generálja ezen feladatok legjobb teljesítéséhez alkalmas kormányzási, gyorsítási vagy fékezési cselekvéseket.
Az oldalsó irányításhoz szükséges a gépkocsi pozíciójának és irányítottságának a sávhoz képesti reprezentálása. A 24.23. ábrán látható kép esetén éldetektáló algoritmusokkal azonosítjuk a sávhatárokat jelző határoló vonalakhoz tartozó éleket. Ezt követően ezekre az élekre sima görbéket illeszthetünk. Ezen görbék paraméterei információt hordoznak a gépkocsi oldalsó elhelyezkedésére nézve, az autó haladási irányára a sávon belül és a sáv íveltségére. Ez az információ – a gépkocsi dinamikájával együtt – képezi mindazt, amire a kormányzást irányító rendszernek szüksége van. Jegyezzük meg azt is, hogy mivel képkockáról képkockára a sáv képi vetületének pozíciója csupán csekély mértékben változik, tudjuk, hogy a képen a sávhatárjelző vonalakat hol keressük – csak azokon a területeken kell keresnünk, amelyek párhuzamos fehér vonalakkal vannak megjelölve.
A hosszanti irányításhoz az előttünk haladó gépkocsik távolságára van szükség. Erre a kétkamerás sztereolátás vagy optikai folyam segítségével tehetünk szert. Mindkét megközelítést lényegesen egyszerűsíthetjük, ha kihasználjuk a sík felületen történő haladásból adódó kényszereket. Ilyen technikák felhasználásával a vizuálisan irányított autók nagy sebességgel hosszú ideig tudnak közlekedni.
Fontos
A gépkocsi-vezetési példa egy szempontot igencsak világossá tesz: egy konkrét feladat esetén a képen elvben található összes információ kinyerése nem szükséges. Nem szükséges a gépkocsik pontos alakjának a meghatározása, az úttal szomszédos füves területekre vonatkozó az-alak-a-textúrából probléma megoldása stb. A feladat információszükséglete csak egy bizonyos típusú információra vonatkozik, és lényeges számítási sebességet és robusztusságot lehet biztosítani, ha csak erre az információra összpontosítunk, és a problémából adódó kényszereket teljes egészében kihasználjuk. Az előbbi részekben bemutatott általános megközelítések célja az volt, hogy egy általános alapelméletet adhassunk, amit majd a konkrét feladat szükségleteihez lehet specializálni.
